

近日,高德正式发布高德地图v13版,并公布了驱动该旗舰版本的新一代导航引擎“奇境”。
据介绍,奇境引擎融合了北斗定位、神经渲染、数字孪生等一系列前沿技术,而基于该引擎的高德地图v13则包含“奇境MAX”、世界地图、盲区会车预警、北斗车道级导航2.0、惯导增强空间定位、顺路搜等功能创新,为用户提供更精准细致,身临其境般的“时空地图”体验。
即日起,用户更新APP至最新版本后,即可体验焕然一新的高德地图。

作为国内领先的数字地图内容、导航和位置服务解决方案提供商,高德地图始终坚持以技术产品创新,引领行业发展。如今在奇境引擎的驱动下,高德地图进一步实现了让用户“身临其境”,而承担这一理念的核心功能,就是可让用户“穿越时空”的“奇境MAX”。
据了解,奇境MAX是高德地图研发的全新目的地决策服务,基于深度神经网络和物理引擎的神经渲染技术,通过在地图上建立生动逼真、美轮美奂的立体场景模型,帮助用户从多时段、多方位地鸟瞰场景,从而感受跨时空、沉浸式的“现场感”,以作为出行前的重要参考信息。
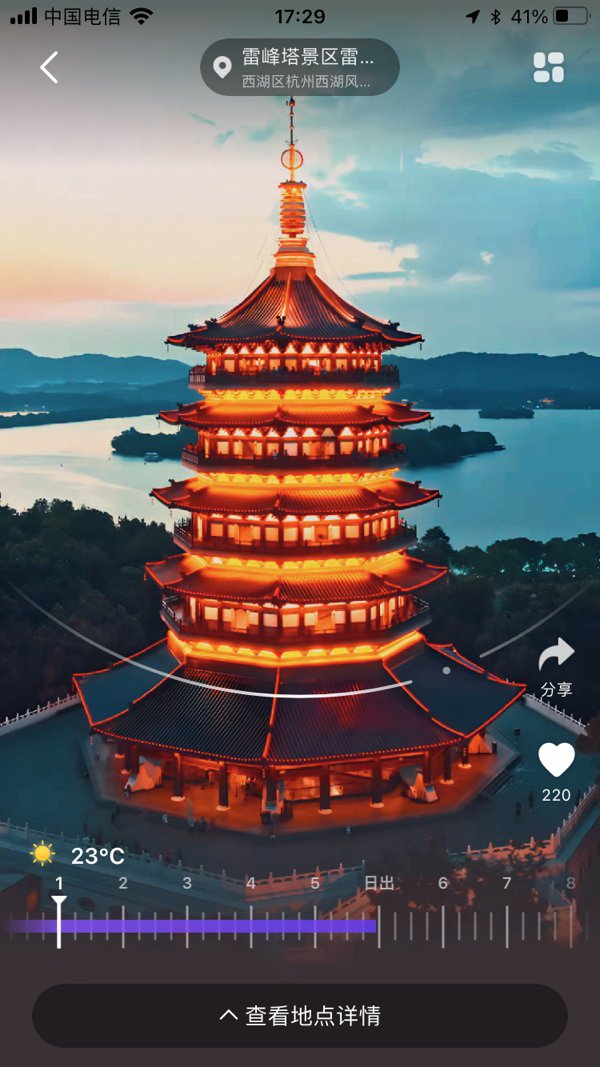
目前,奇境MAX已广泛应用于国内,以及部分海外的知名景点和地标建筑。用户只需在APP上用双指缩放地图,或者搜索热门景区名称,就可以看到通往各个奇境的“任意门”入口;进入相应奇境MAX界面后,还能查看不同时间段、不同方位角度下的全景风貌,部分景点甚至可以渲染夜晚和不同季节的场景变化,呈现更为惊艳的3D光影效果;此外,用户也可进一步了解获取景点的更详细介绍和购票信息,并一键导航前往。
奇境MAX通过营造“穿越时空,身临奇境”的场景体验,辅助用户行前决策。决策后即是出行,高德地图v13的其他产品功能从各自维度,阐释了“时空地图”的意义。
例如基于北斗系统这一“国之重器”、自主知识产权的时空基础设施,高德可为用户提供更精细化的车道级交通事件预警和盲区会车预警服务:
高德北斗车道级导航2.0,可精准识别当前车道前方,是否有路障、车辆急刹车等情况,并在合理的时间提前量区间内,通过导航画面和语音播报告知用户,尽可能减少高速和城市快速路段的驾车安全隐患。
高德手机盲区会车预警服务,则是通过在空间上精准识别弯道、无灯路口等盲区路段,并基于静态位置和动态车速实时计算得出合理的时间提前量,向用户智能提示其他方向道路的来车情况。

隧道岔路怎么走?车在高架第几层?停车场里定位不准?这些一直是导航过程中极难解决的命题。高德地图v13基于自主研发的“惯性导航空间定位技术”,升级了隧道导航、高架导航、停车位导航等一系列不同场景下的服务。如今无论是隧道内外,还是高架桥上下,或是停车场里,用户都可以享受到更精准细致的空间定位服务,出行更省心。

此外,还有可以“顺道办一切”的高德顺路搜服务。用户驾车出发前或行程中途,在起点和终点之间增加“途径点”变量后,高德就会实时运算得出综合时间和空间维度的导航路线最优方案,让用户顺路办事尽可能不饶太远,也不会耗费过多时间。
高德地图v13的发布,标志着行业整体已向“时空互联”的趋势深度发展,通过连接现实世界中更多的物理细节和要素,持续进行实时的大规模交互计算,推演出时间和空间层面的出行最优解;再加上能为用户提供“穿越时空,身临奇境”般的体验,实现由查询、决策、消费到出行的完整出门生活服务链路,或将成为未来地图导航产品的全新标准。







