
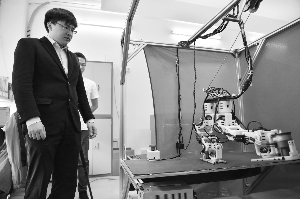
 黄之峰团队双足机器人能跨过45厘米宽的空隙。信息时报记者 朱元斌 摄
黄之峰团队双足机器人能跨过45厘米宽的空隙。信息时报记者 朱元斌 摄信息时报讯 (记者 孙小鹏 张艳 实习生 陈菲菲 通讯员 朱小翠) 高抬腿,大跨步,迈过45厘米的沟不在话下。近日,国际著名科技杂志《美国电子工程学会科技纵览》官网刊文介绍广东工业大学黄之峰团队的研发成果“Jet-HR1”双足机器人,让广州科技团队再次闪耀世界科创行业,提升“广州智造”全球显示度。据悉,该双足机器人能跨越4厘米宽的沟,这个宽度达到了其腿长的97%;而在先前的其他仿人机器人研究中,这个数据一般只有20%。
突破
装上“风火轮”实现大跨步
重6.5千克,高65厘米,只有“下半身”,两只脚掌分别装有一个形似“风火轮”的涵道风机引擎,黄之峰团队的Jet-HR1(喷射仿人机器人1号)双足机器人可谓“其貌不扬”,可这其貌不扬的家伙,却实现了双足仿真机器人在技术上的突破。“一般其他研究在做的都是如何实现更稳定的行走,而我却在机器人的脚上装上了风机。”广东工业大学副教授黄之峰说道。
在现场,只见机器人启动后,却并没有直接抬腿迈步,而是面对前方的“小沟”做了7-8秒的“思考”停顿。黄之峰解释到,机器人会将整个运动轨迹拆分成360多个点,因此首先它需要先做数据计算。随后,机器人终于迈出一只脚,在触及另一边的木板后,Jet-HR1做了一个几近“劈叉”的压腿动作,然后再抬起另一条腿,并顺利落地。完成这一动作,双足机器人大概花了24秒左右。据介绍,风机的重量有232克,但可以输出2.3千克的推力,刚好为双足机器人跨越障碍物提供所需的平衡。目前Jet-HR1最大能够跨过45厘米的宽度。
黄之峰表示,在实现2D跨步之后,接下来他们正在尝试3D跨步。即是说,当前双足机器人只能实现向正前方迈步,但现实情况中可能前方没有可以落脚的点,那么就需要机器人可能向侧前方跨出一步。“双足机器人目前还处于非常初级的阶段,但过十年、二十年后,可能就真的能够在地震救援等复杂路面行走中发挥作用。”黄之峰告诉记者。
故事
导师告诉他,研究仿人机器人难毕业
“要是研究这个会毕不了业”。黄之峰依然记得当年在东京大学读博时,非常想研究仿人机器人,但却被导师的一句话吓到了。原来,这个领域在国外的发展已经很大,很难再做得比别人好。在导师善意的提醒下,黄之峰在读博期间研究起了“面向多向化移乘训练的机器病人”,模仿瘫痪病人的动作行为,用于训练护士。当时对机器人运动能力的相关研究,为后来黄之峰回国后的机器人研究奠定了基础。
而一场地震,让黄之峰要研究仿人机器人的想法更加坚定。原来当年在东京大学读书时,日本发生过一次强烈地震,引发了巨大的海啸,最终导致福岛第一核电站核泄漏。而在那一次地震之后,黄之峰注意到地震废墟中的糟糕地形,给仿人机器人的移动带来很大限制。“双足机器人跨越大尺度障碍物是困难的,因为跨得太远会打破静态平衡条件,这个条件需要机器人质心在地面的投影位于其脚底的支撑多边形之内。而另一些动态动作,例如跳跃,也可以考虑为一种解决方案,但是其着地的冲击会可能会造成本来就不坚固的地面发生二次坍塌。”所以,当时他就考虑到,需要有一种新的方法来保持机器人的准静态平衡。
一周实验五六回,一年后终有突破
回国后的黄之峰来到广东工业大学,开始组建自己的研究团队。
在黄之峰的研究团队中,共有二十名学生,其中六名学生进行双足机器人水平大尺度障碍跨越的研究。“最多的时候一周实验五六回,每回进行七八次实验。”每周不停的实验,对于黄之峰的研究团队来说已经是家常便饭。哪怕经历了一年的无数次实验,团队对双足机器人水平大尺度障碍跨越的研究仍然没有大的进展。
在多次实验无果之后,黄之峰开始从借助外力这一角度去思考,机器人或许也可以借助外力调整自身重心维持平衡进行运动。而无意间的一个想法,就此让实验终于有了大突破。原来,黄之峰考虑到这个研究制作的机器人比较轻,而重量232g的涵道风机输出的推力可达2.3kg,那么把涵道风机装到机器人的脚上,为何不可呢?
就这样,黄之峰在机器人的脚掌上装上了涵道风机,让双足机器人在涵道推进系统的辅助下进行水平大尺度障碍跨越的尝试。在一次次调整和一次次实验之后,成功终于到来了:高抬腿,大跨步,机器人终于跨过45厘米宽的沟!而这一研究成果被刊登在《美国电子工程学会科技纵览》官网。







