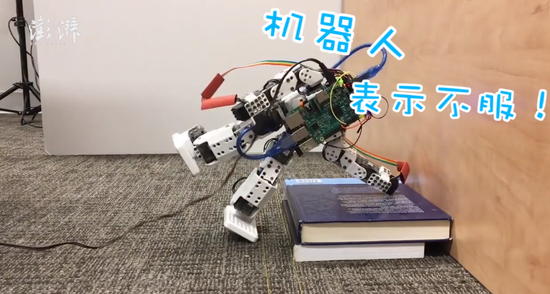
7月17日,杜克大学公布的视频中机器人学会了扶墙以免摔倒,研究组希望其能利用周围环境在失去平衡后进行自我纠正,未来其还将配备环境传感器以借助动态地图避免摔倒。


7月17日,杜克大学公布的视频中机器人学会了扶墙以免摔倒,研究组希望其能利用周围环境在失去平衡后进行自我纠正,未来其还将配备环境传感器以借助动态地图避免摔倒。

07-20 16:19评论(124)|
07-20 16:04评论(5)|
07-20 15:22评论(0)|
07-20 15:22评论(0)|
07-20 15:22评论(0)|
07-20 15:22评论(0)|
07-20 15:15评论(14)|
07-20 15:05评论(0)|
07-20 14:43评论(0)|
07-20 14:34评论(2)|













查看评论(0)网友评论
发 表 登录|注册